Contact
Provider(s):
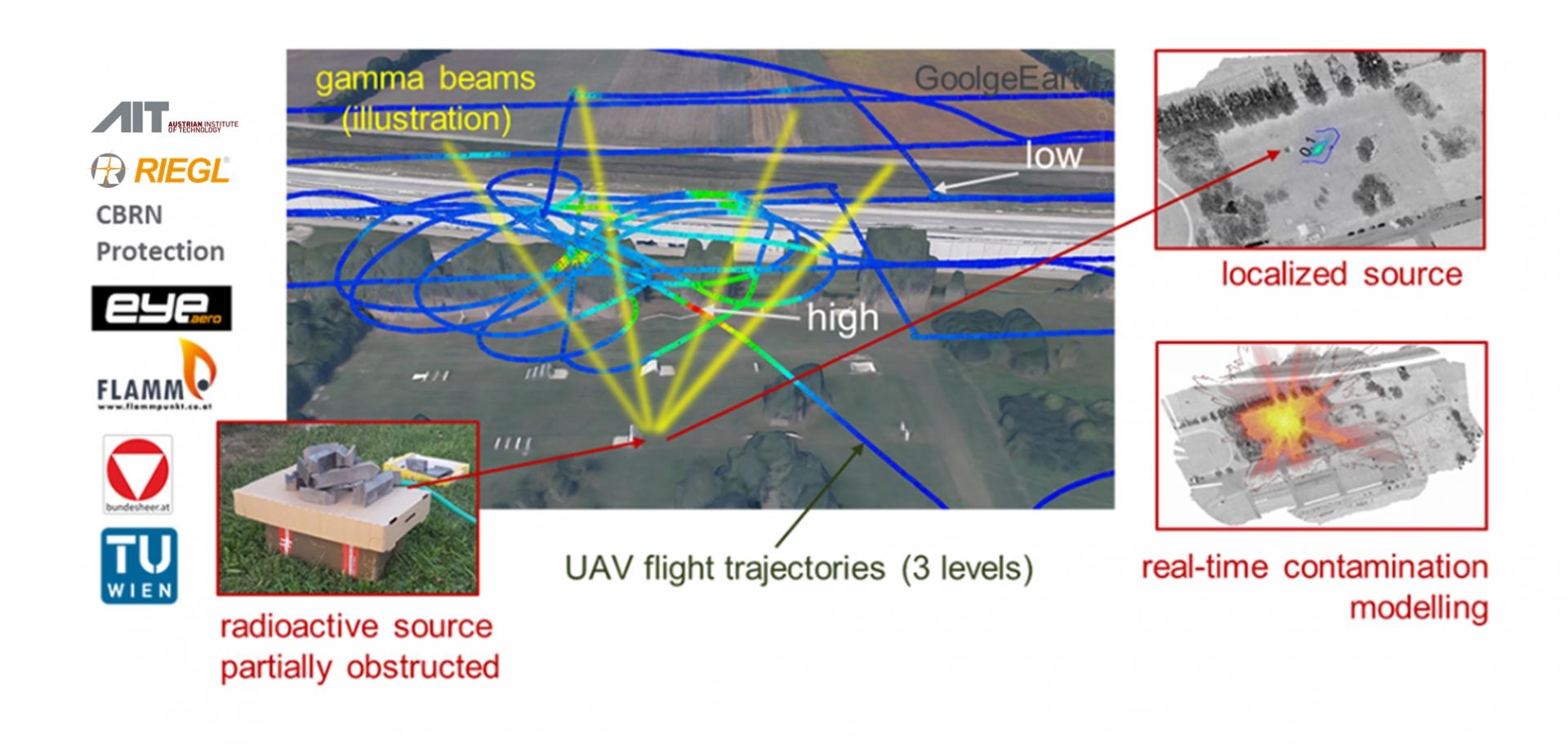
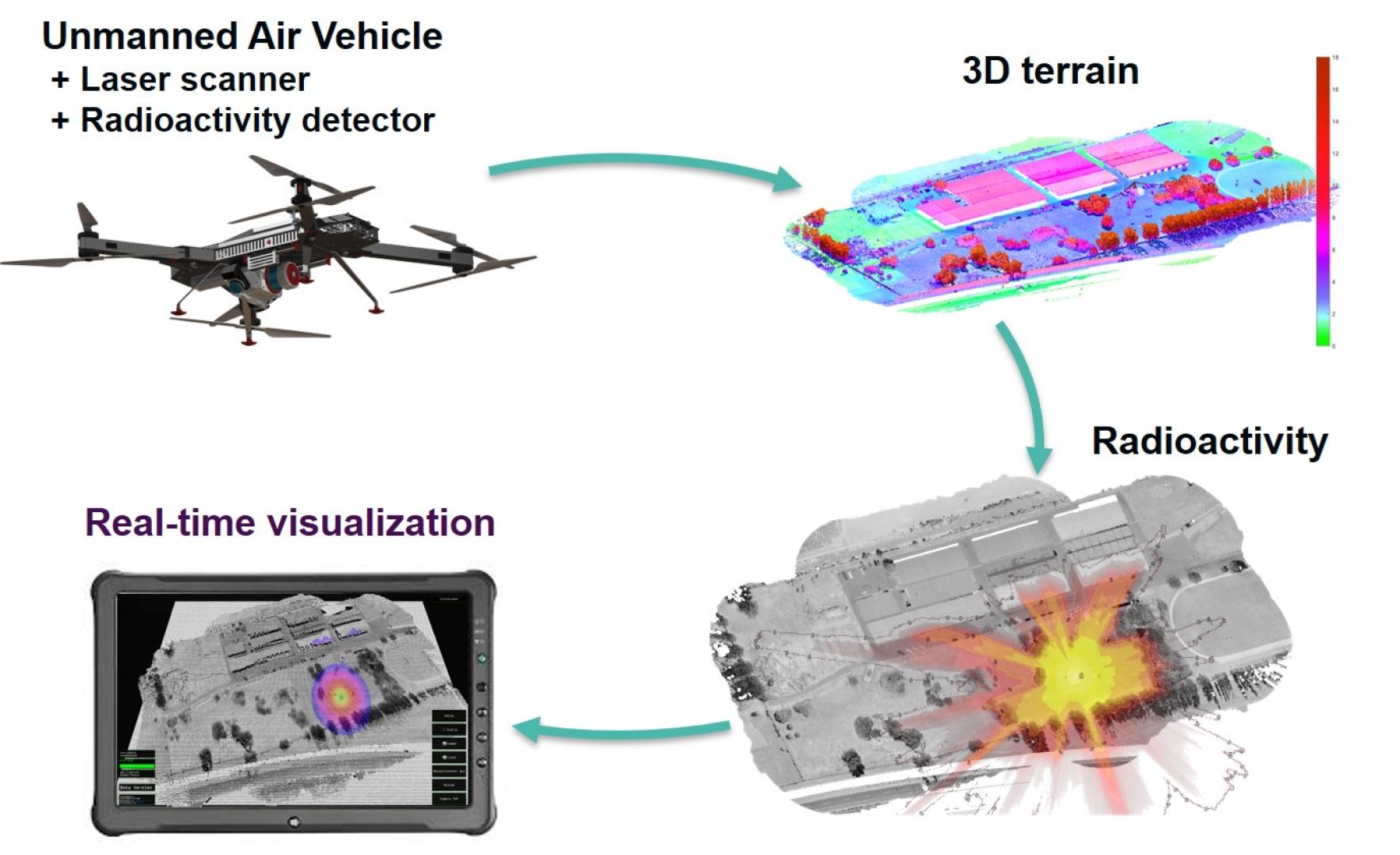
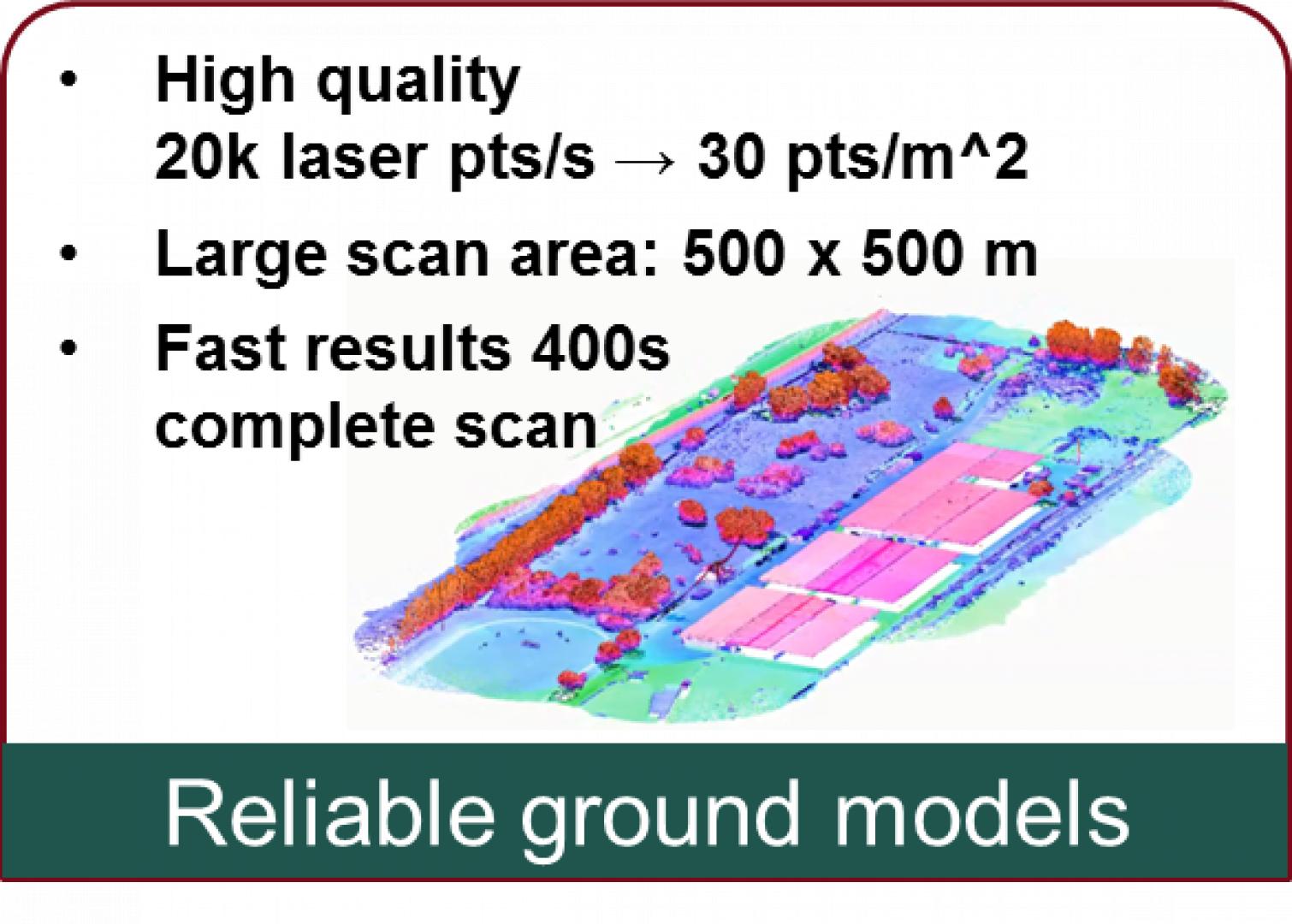
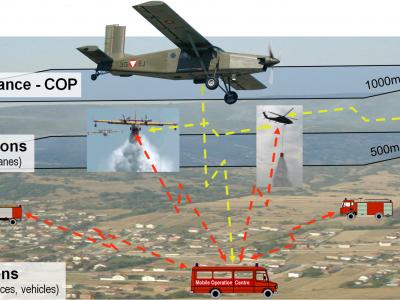
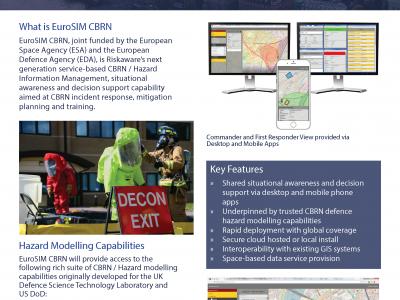
De nadruk van het SECURESCUE-project is het realtime 3D 360° in kaart brengen van een gebied voor ramprespons gebruikmakend van mobiele verkenningsrobots. Het doel is het bereiken van snel situationeel- en risicobewustzijn voor de ondersteuning van de veilige en efficiënte inzet van hulpverleners. De nieuwe laserscanner in de lucht wordt gemonteerd op een onbemand luchtvaartuig (UAV) en wordt gebruikt om het situationeel bewustzijn voor rampscenario’s te verbeteren.
De gegevens worden gecombineerd met bestaande informatie van sensoren aan boord (bijv. gas- en stralingssensoren) voor het verkennen van rampgebieden en het opsporen van mogelijke risico's (bijv. hoge verontreinigingsniveaus, gevaarlijk gas) voor veilige en zoek- en reddingsacties. Het project ontwikkelde de realtime weergave van de 3D-informatie (bijv. visueel, straling, chemisch, positie) en continue visualisatie in de vorm van een 3D-informatiekaart op mobiele terminals (bijv. draagbare apparaten) voor hulpverleners. Het hele systeem is geëvalueerd aan de hand van echte scenario's van het ministerie van Defensie (BMLVS) in Opper-Oostenrijk.
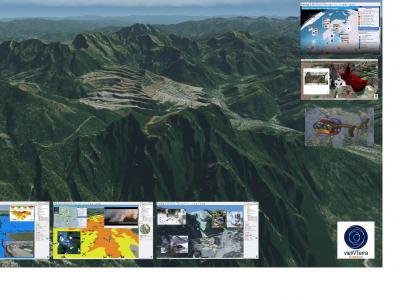
Buiten – Test in de echte wereld op basis van UAV (unmanned aerial vehicle):
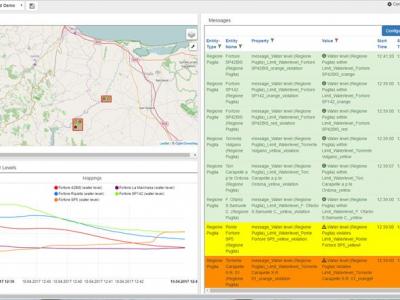
Genereren van een consistent beeld van 3D LiDAR- en CBRNE-sensoren door
- het samenvoegen van alle beschikbare metingen (LiDAR, radioactiviteit) in een
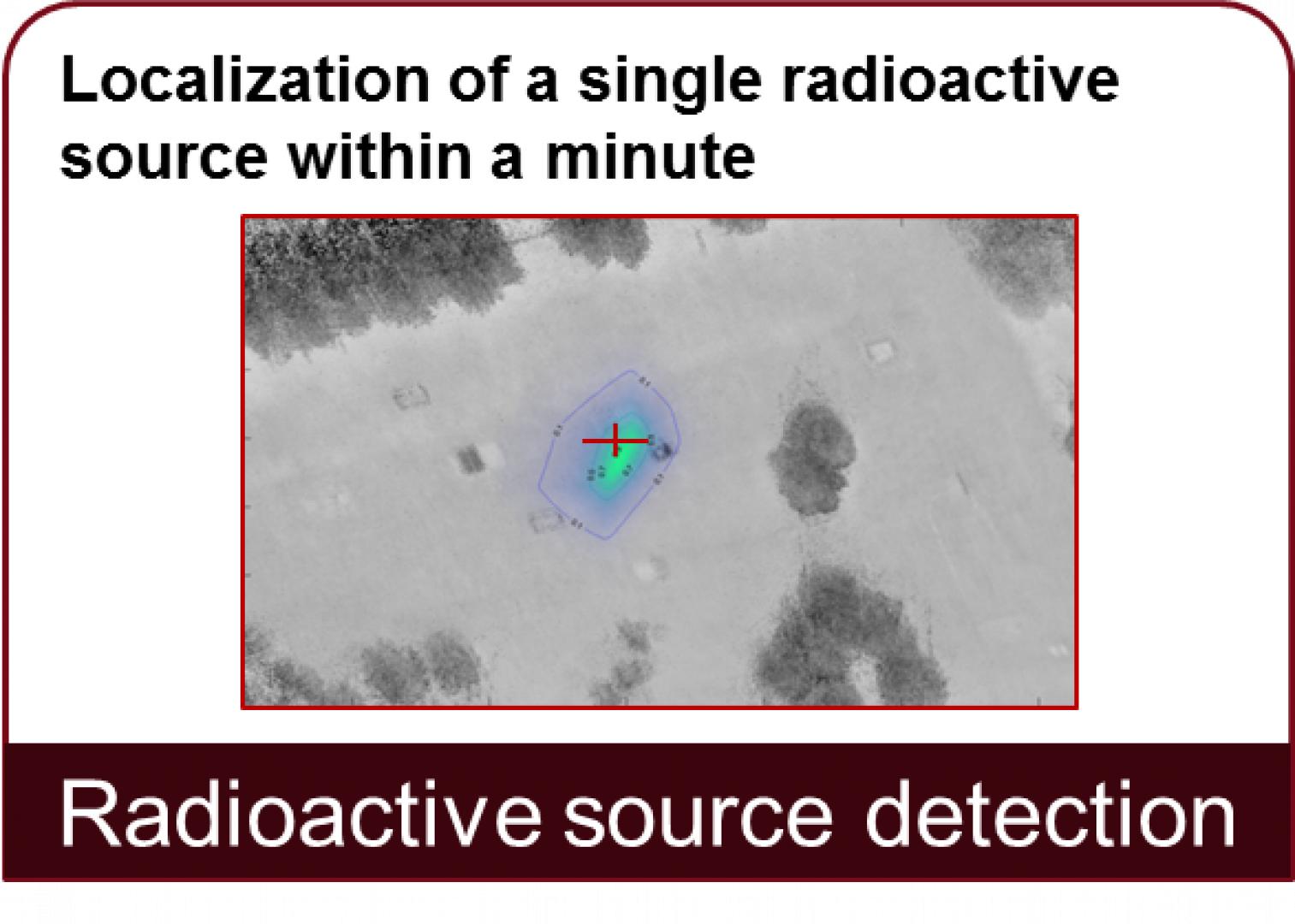
- uitgebreide informatieset voor het achterhalen van de locatie en de parameters van de radioactieve bronnen en
- realtime modellering van radioactieve verontreiniging
Supported Use Cases
SecuRescue: Realtime situatieoverzicht van de lokale situatie voor nooddiensten met onbekende / gevaarlijke stoffen


Documentation
Similar Solutions

 |
De Portfolio of Solutions website is oorspronkelijk in het kader van het DRIVER+-project ontwikkeld worden. Vandaag wordt de dienst door AIT Austrian Institute of Technology GmbH, ten behoeve van de Europese crisisbeheersing beheerd . PoS is door het Disaster Competence Network Austria (DCNA) en door de H2020 projecten STAMINA en TeamAware gesteund. |