Contact
Provider(s):
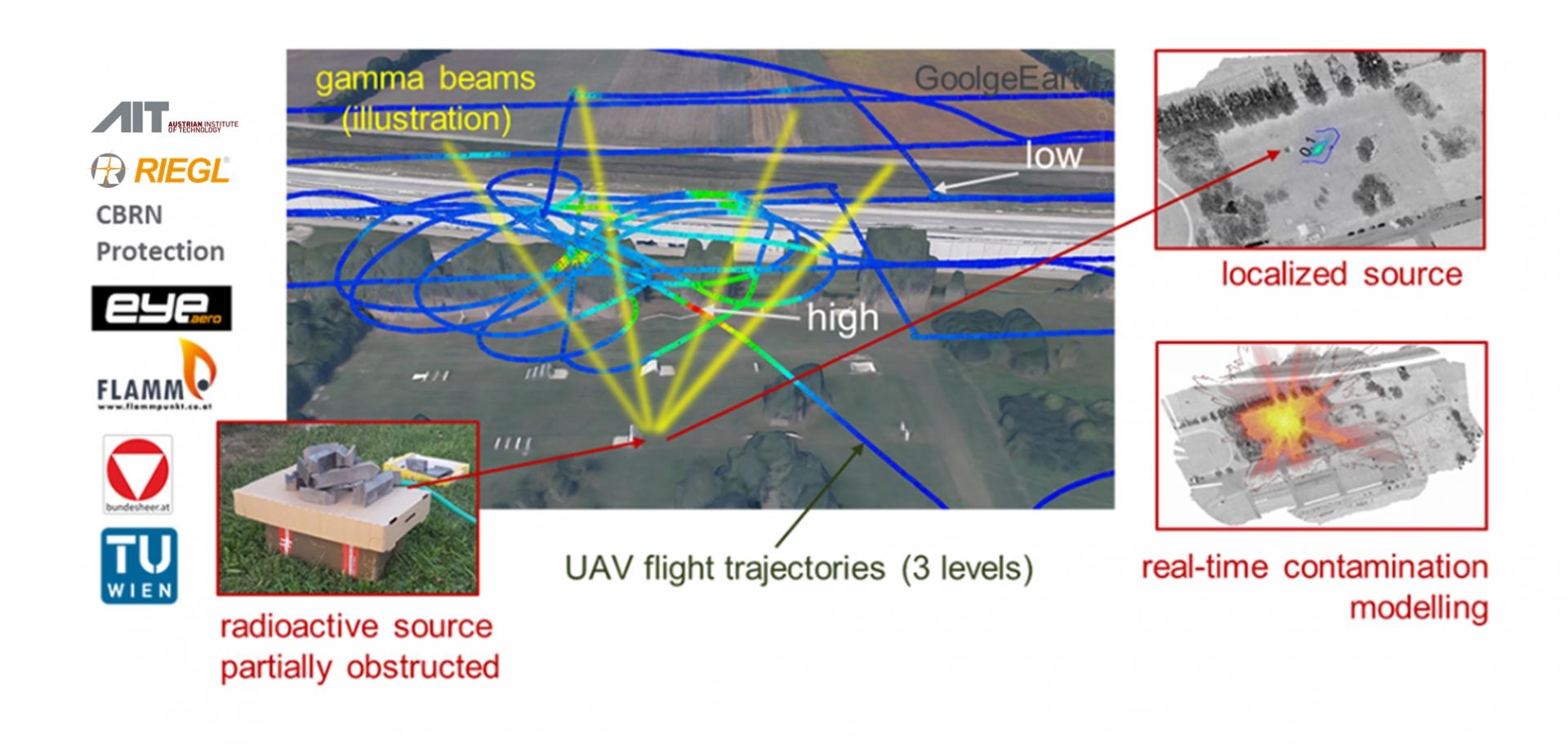
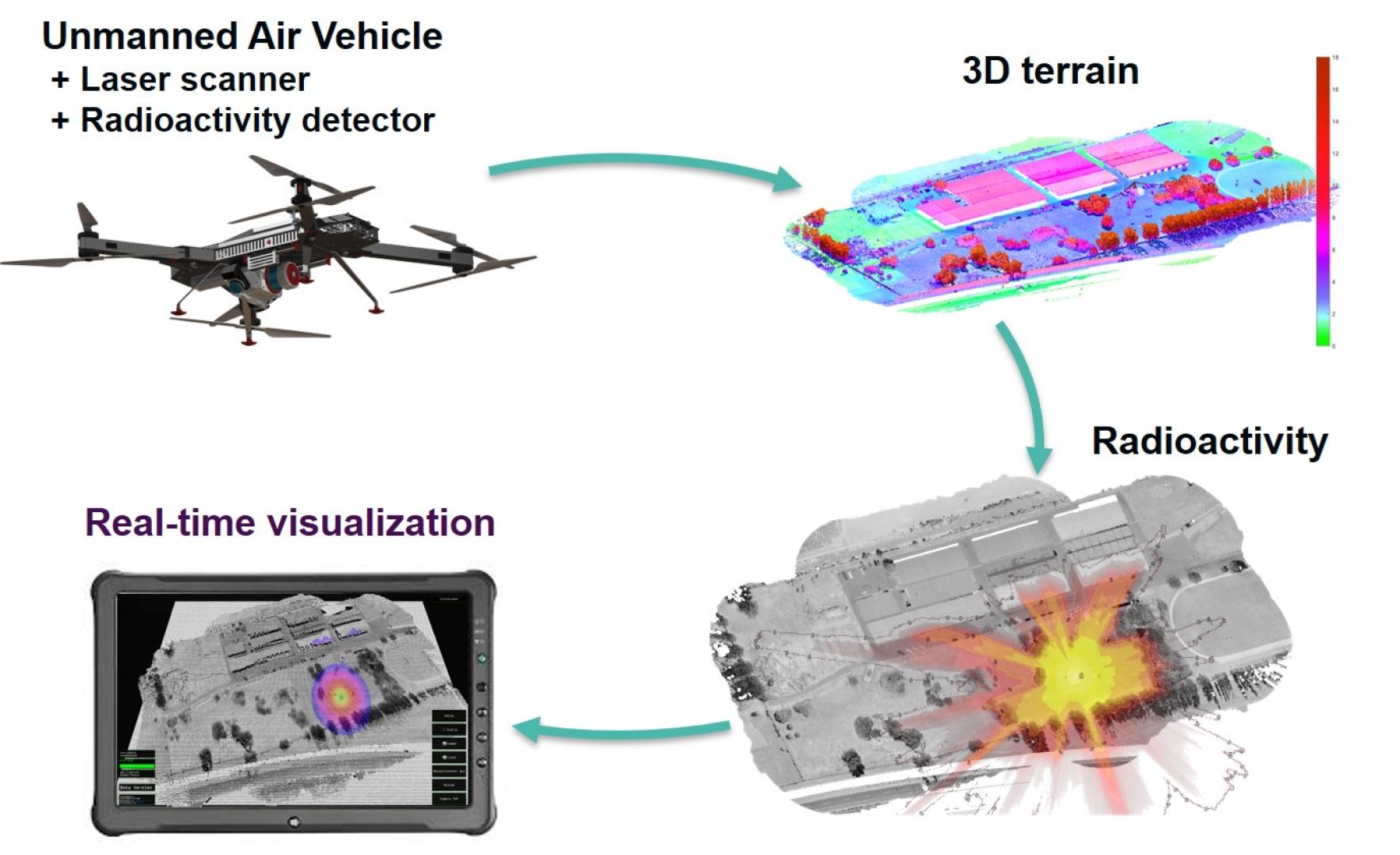
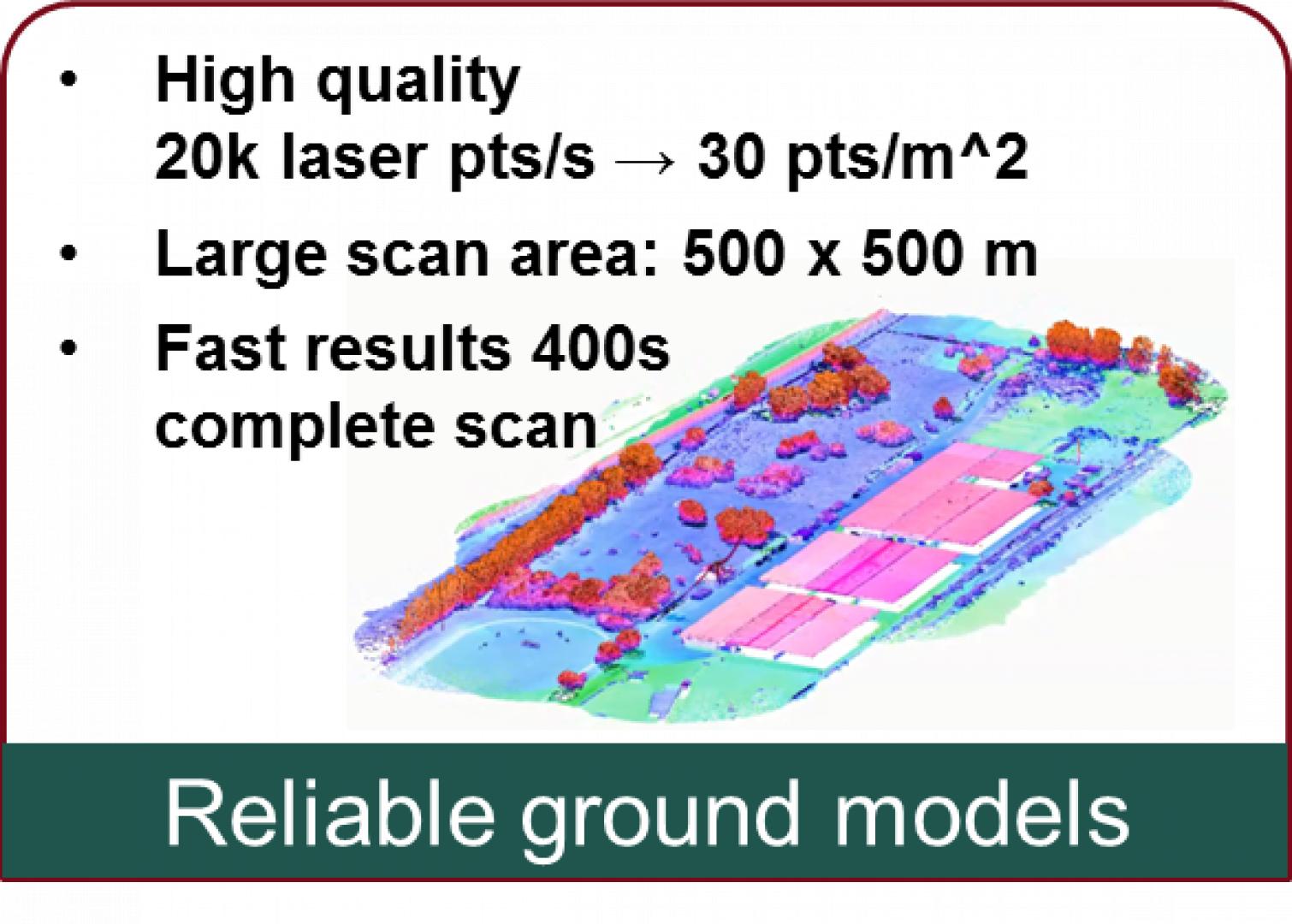
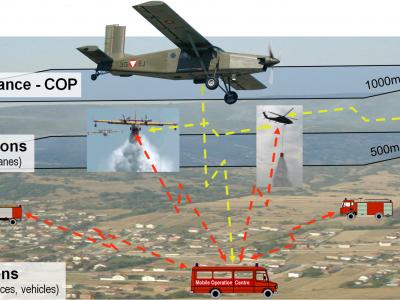
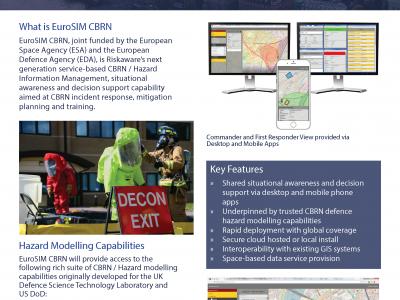
Das Hauptaugenmerk des SECURESCUE Projektes liegt auf der 3D 360°-Kartierung eines Gebietes in Echtzeit für die Katastrophenbewältigung unter Verwendung mobiler Erkundungsroboter. Das Ziel ist das schnelle Erzielen eines Lage- und Risikobildes zur Unterstützung des sicheren und effizienten Einsatzes von Ersthelfern. Der neuartige luftgestützte Laserscanner wird auf einem unbemannten Luftfahrzeug (UAV) montiert und wird für eine verbesserte Lageerkennung bei Katastrophenszenarios verwendet.
Die Daten werden mit vorhandenen Informationen von Bordsensoren kombiniert (z. B. Detektoren für Gase und Radioaktivität) für die Erkundung von Katastrophengebieten und den Nachweis möglicher Risiken (z. B. hohe Kontaminierungsstufen, gefährliche Gase), um sichere Such- und Rettungsaktivitäten zu ermöglichen. Das Projekt entwickelte die Präsentation der 3D-Informationen in Echtzeit (z. B. visuell, radiologisch, chemisch, lagetechnisch) und die fortlaufende Veranschaulichung in der Form einer 3D-Informationskarte auf mobilen Terminals (z. B. tragbare Geräte) für die Einsatzkräfte. Das ganze System wurde unter Verwendung von realen Szenarien des Verteidigungsministeriums (BMLVS) in Oberösterreich bewertet.
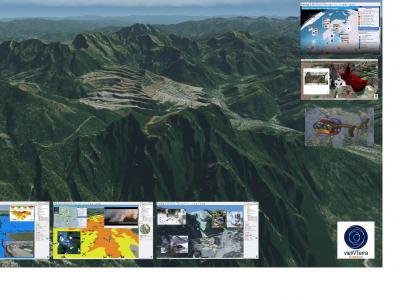
Außenbereich - UAV-basierter (unbemanntes Luftfahrzeug) Test in der Realität:
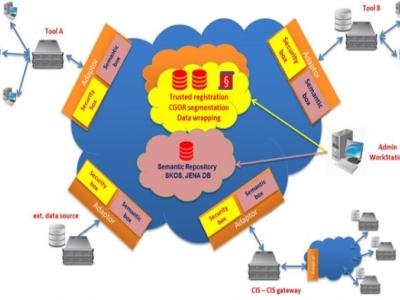
Erstellen einer einheitlichen Ansicht von 3D LiDAR und CBRNE-Sensoren durch
- eine Fusionierung aller verfügbaren Messungen (LiDAR, Radioaktivität) in einen
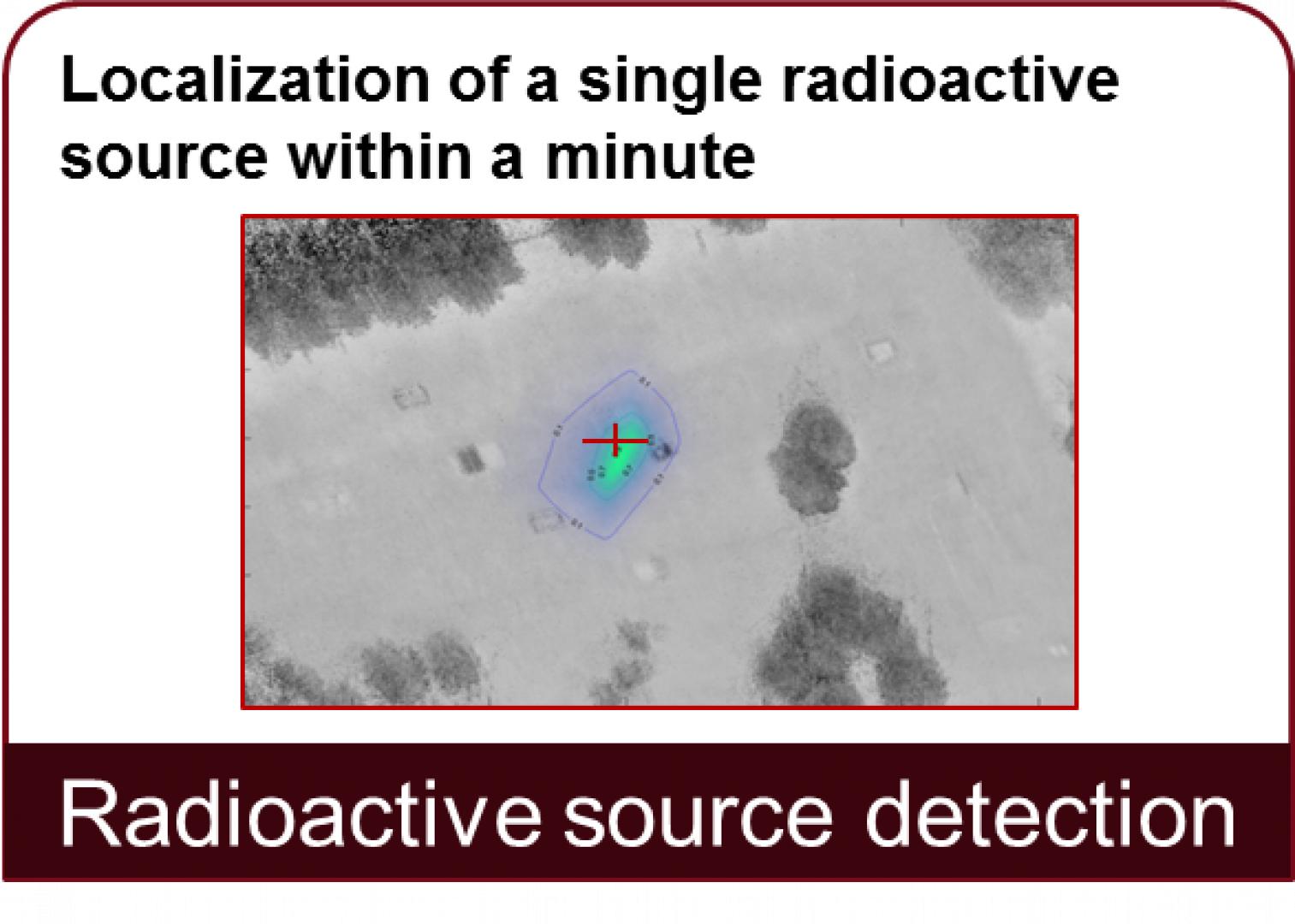
- umfassenden Satz an Informationen zur Ermittlung des Ortes und der Parameter radioaktiver Quellen und
- Erstellung von Modellen einer radioaktiven Verseuchung in Echtzeit
Supported Use Cases
SecuRescue: Bewertung der lokalen Lage in Echtzeit für den Notfallhelfer mit unbekannten / gefährlichen, riskanten Substanzen


Documentation
Similar Solutions

 |
Die Portfolio of Solutions Website wurde ursprünglich im Rahmen des DRIVER+ Projekts entwickelt. Heute wird das Service von der AIT Austrian Institute of Technology GmbH. zum Nutzen des europäischen Krisenmanagements betrieben. PoS ist vom Disaster Competence Network Austria (DCNA) sowie von den H2020-Projekten STAMINA und TeamAware befürwortet und unterstützt. |