Contact
Provider(s):
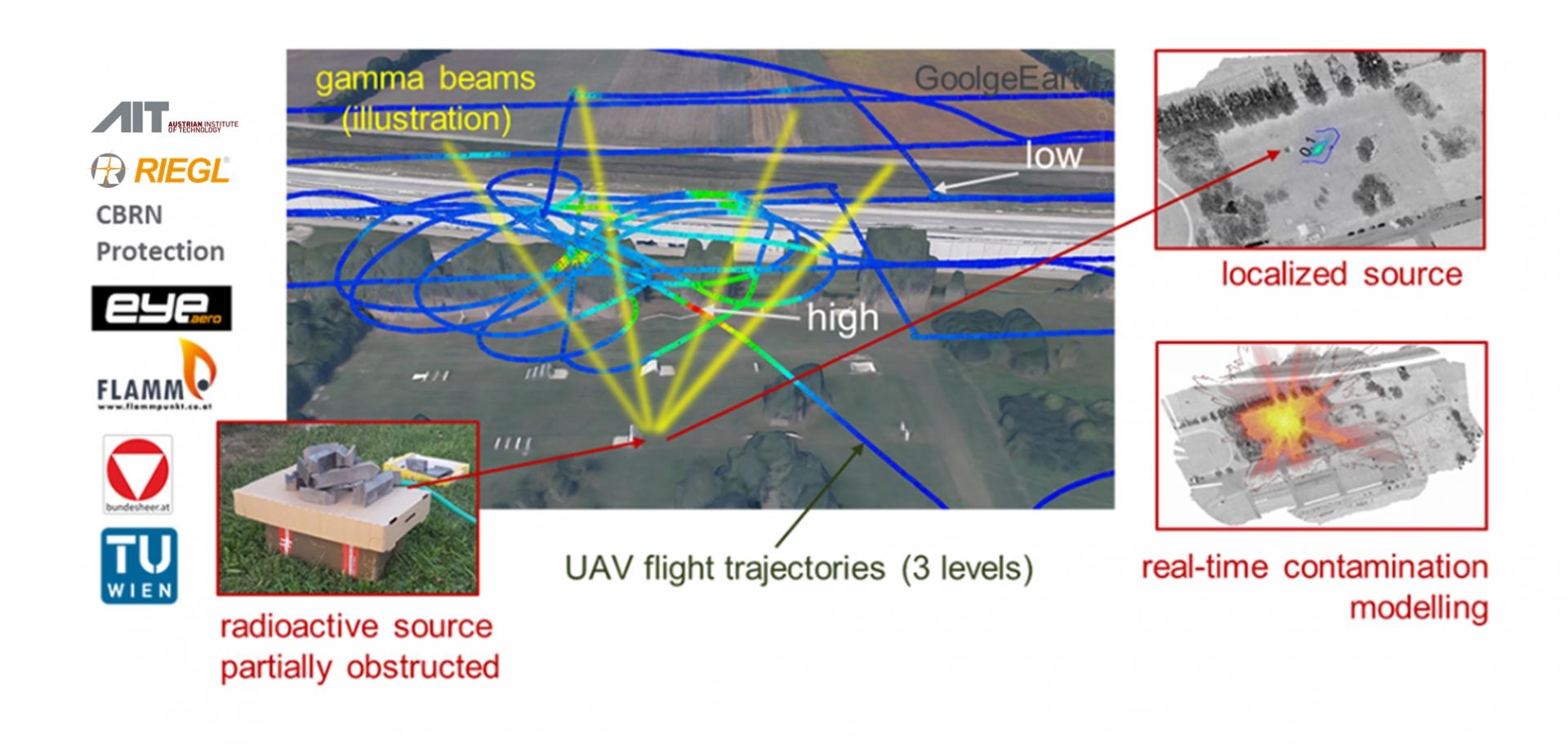
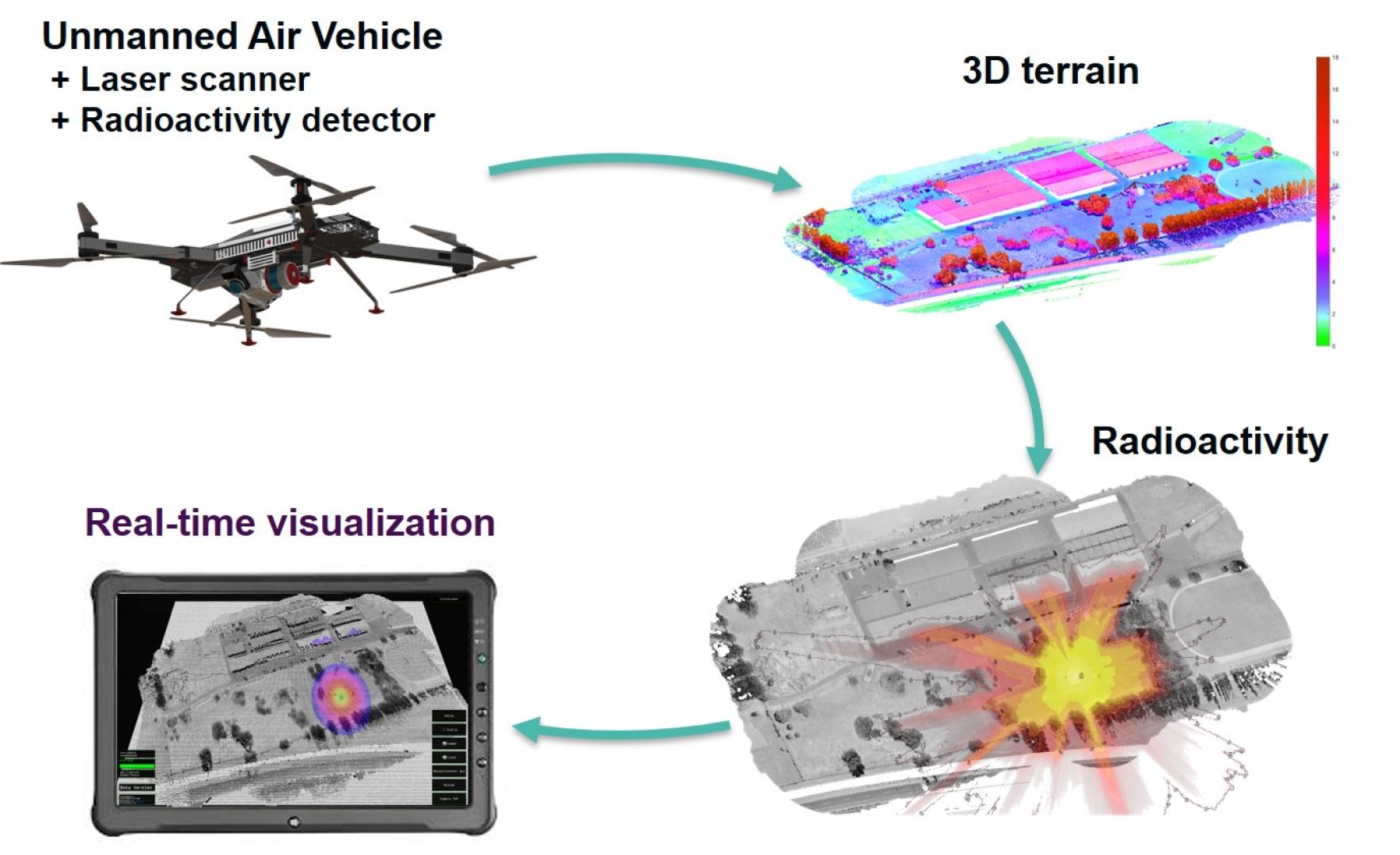
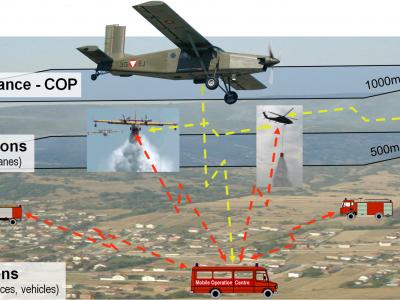
El proyecto SECURESCUE se centra en la creación de mapas 360° en 3D en tiempo real de las zonas para mejorar la ante catástrofes mediante el uso de robots móviles de reconocimiento. Este proyecto tiene por objetivo obtener un conocimiento de los riesgos y la situación con mayor rapidez para apoyar el despliegue seguro y eficiente de los equipos de primera intervención. El novedoso escáner láser aerotransportado, que se monta en un vehículo aéreo no tripulado (UAV), se emplea para mejorar el conocimiento de la situación en escenarios de .
Los datos se combinan con la información existen obtenida a partir de los sensores incorporados (por ejemplo, los detectores de gas y radiaciones) para examinar las zonas afectadas y detectar posibles riesgos (como altos niveles de contaminación, gases peligrosos) y llevar a cabo las actividades de búsqueda y salvamento de forma segura. Este proyecto permite representar en tiempo real la información 3D (como la información visual, de las radiaciones, los productos químicos y la posición) y visualizarla de manera continua en forma de un mapa de información 3D en terminales móviles (por ejemplo, los dispositivos portátiles) para los servicios de . Todo el sistema se ha evaluado utilizando escenarios reales del Ministerio de Defensa (BMLVS) de la Alta Austria.
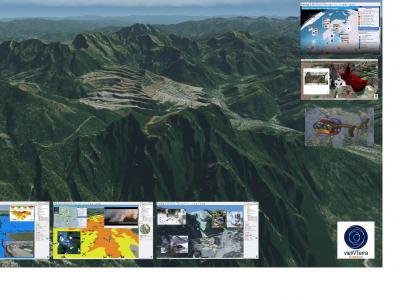
Prueba real en exteriores mediante el uso de un vehículo aéreo no tripulado (UAV):
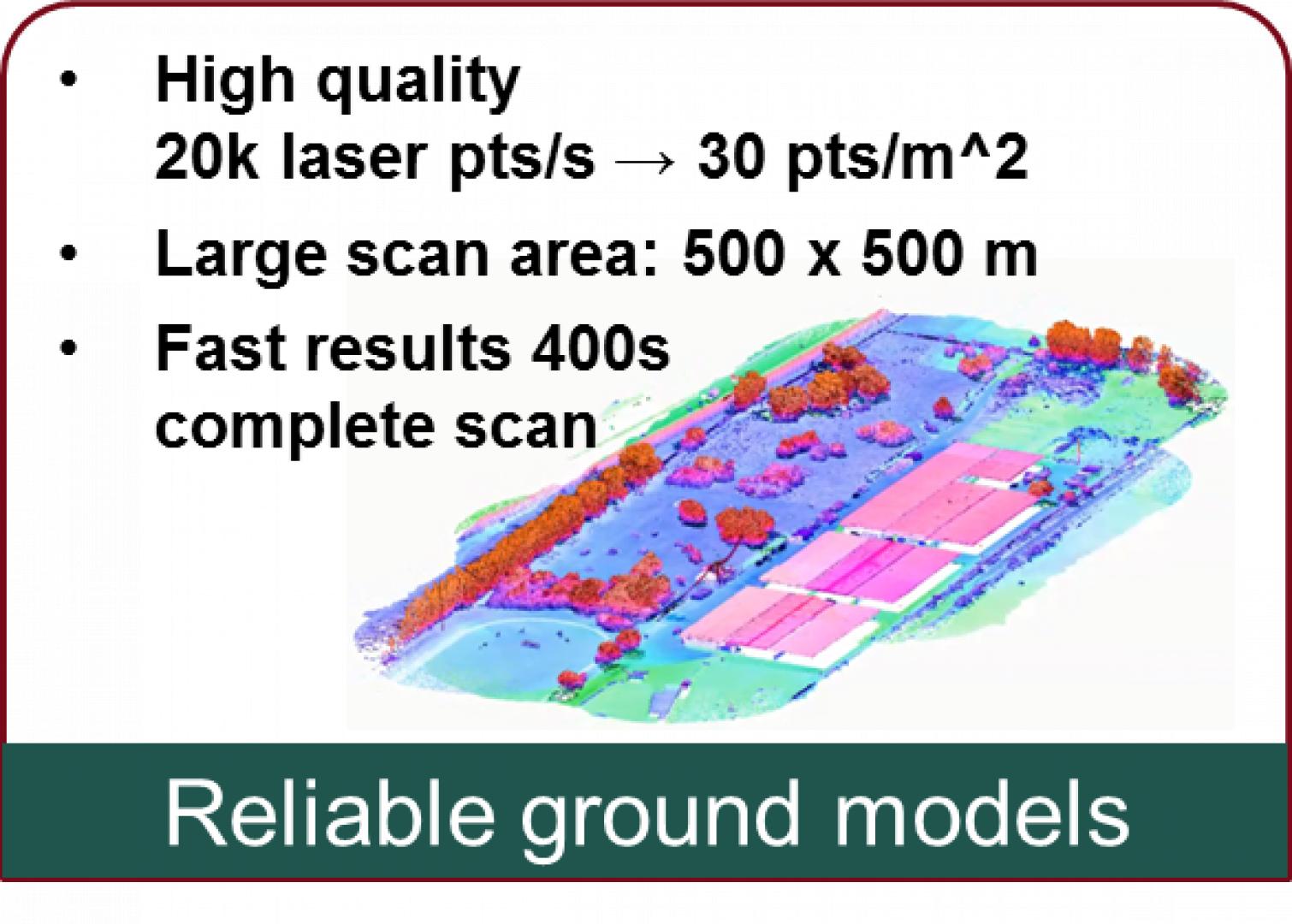
Creación de un vista sistemática de los sensores LiDAR 3D y de sustancias ENRBQ
- que combina todas las mediciones disponibles (LiDAR, radiactividad) en un
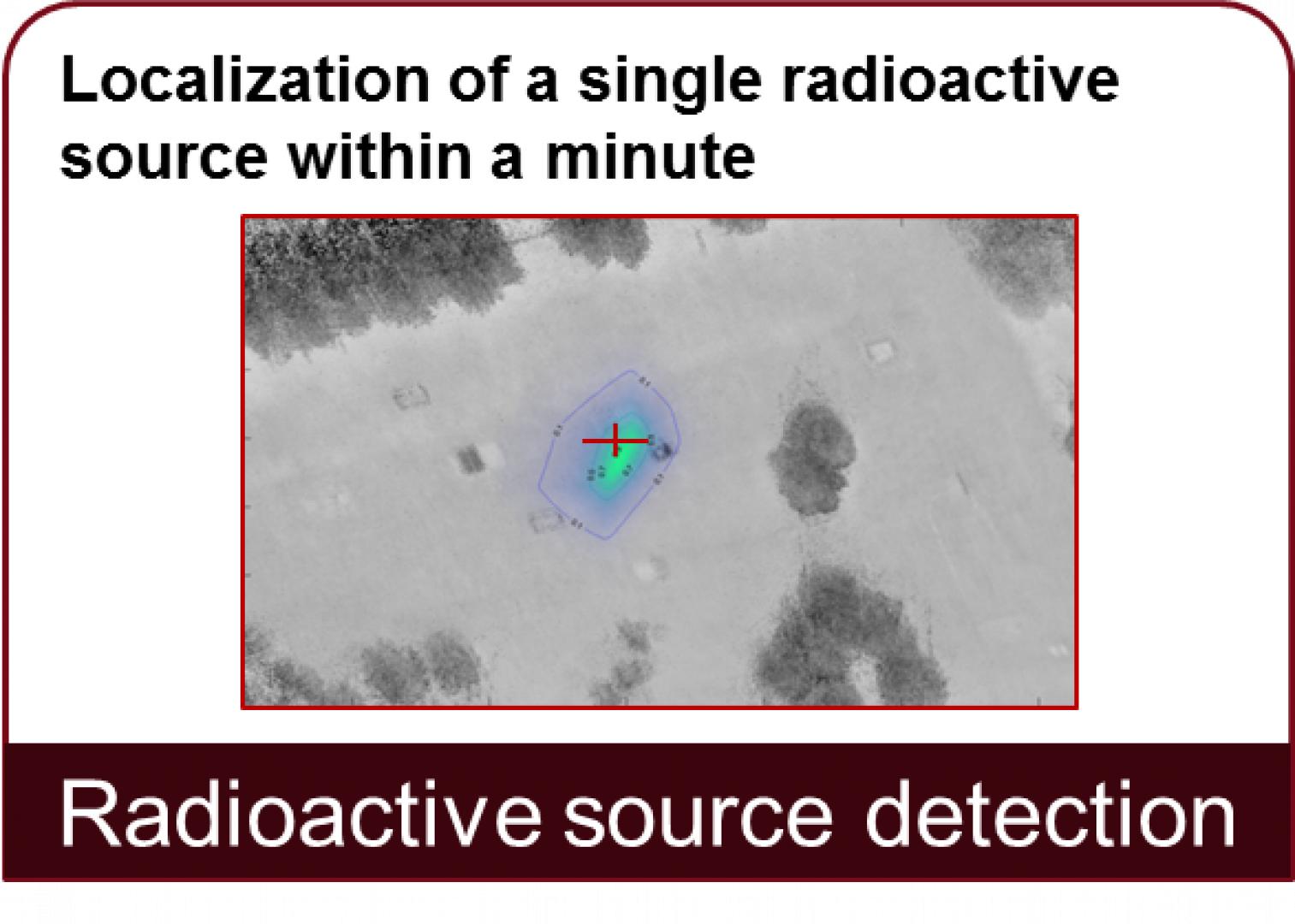
- exhaustivo conjunto de información para mostrar la ubicación y los parámetros de las fuentes radioactivas, y
- generar modelos en tiempo real de la contaminación radiactiva.
Supported Use Cases
SecuRescue: Estudio de la situación en tiempo real de la situación local para fuerzas de respuesta ante emergencias con sustancias peligrosas o desconocidas.


Documentation
Similar Solutions

 |
El sitio web Portfolio of Solutions se desarrolló inicialmente en el marco del proyecto DRIVER+. En la actualidad, el servicio está gestionado por el AIT Austrian Institute of Technology GmbH, en beneficio de la gestión europea de . El PoS está avalado y apoyado por la Disaster Competence Network Austria (DCNA), así como por los proyectos STAMINA y TeamAware H2020. |