Contact
Provider(s):
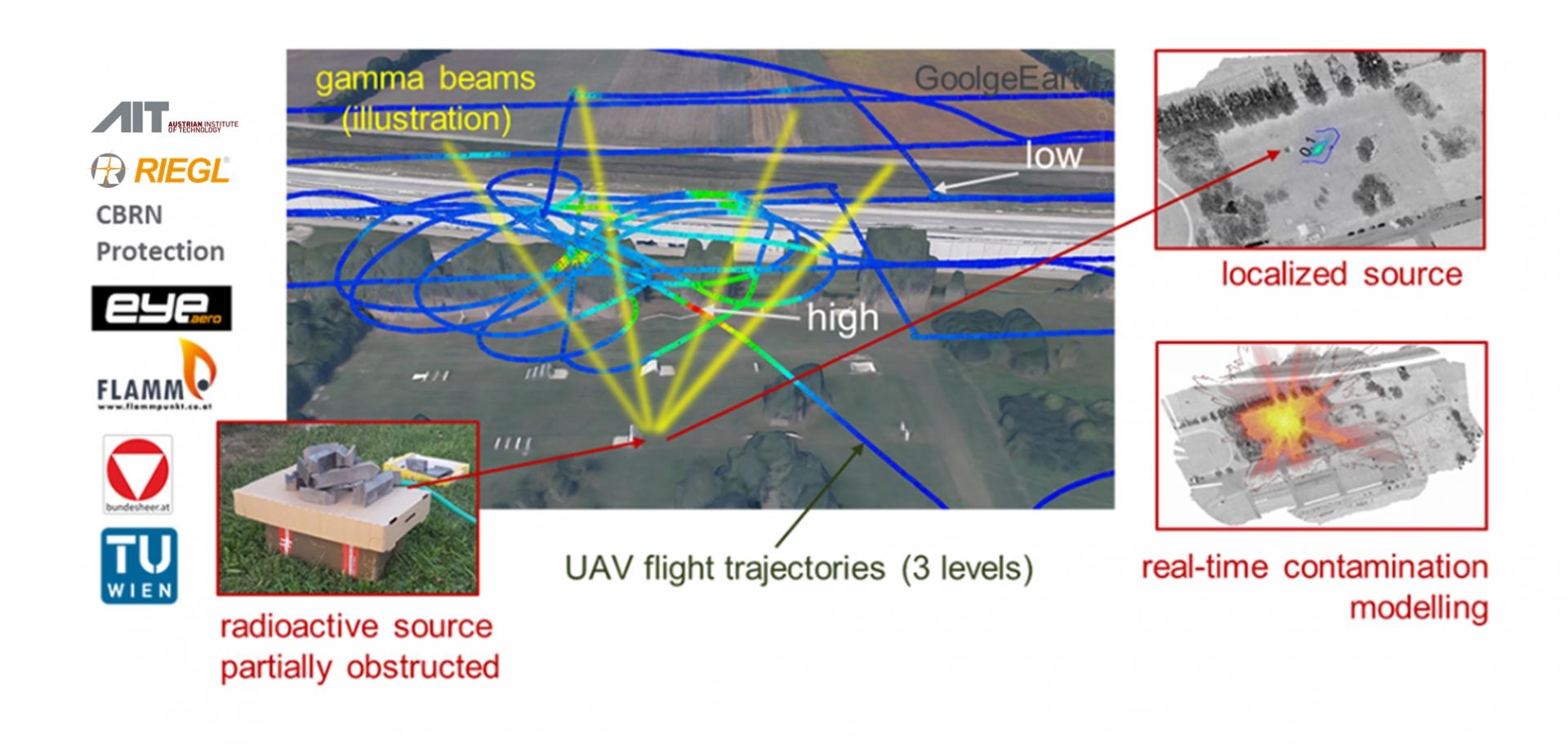
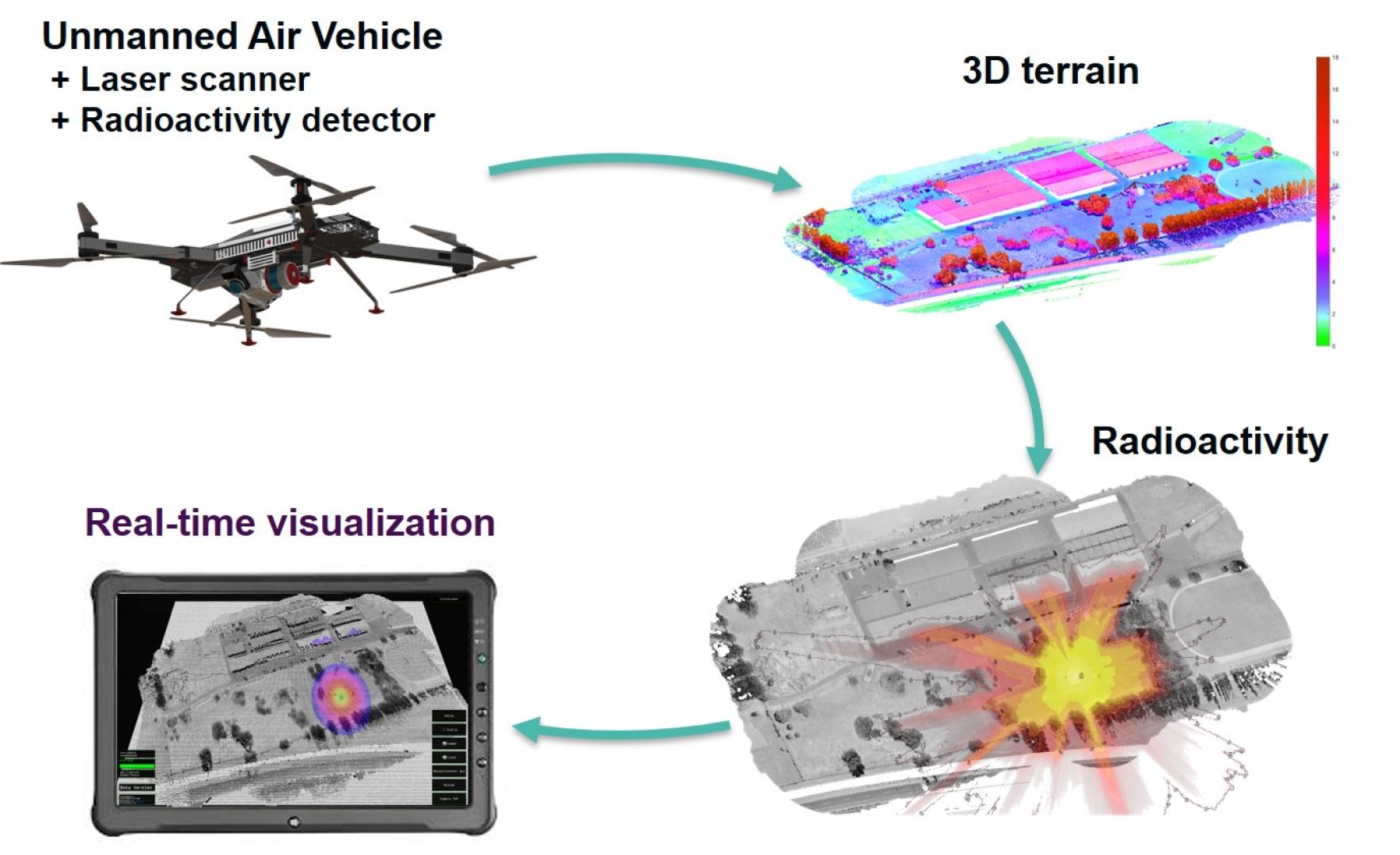
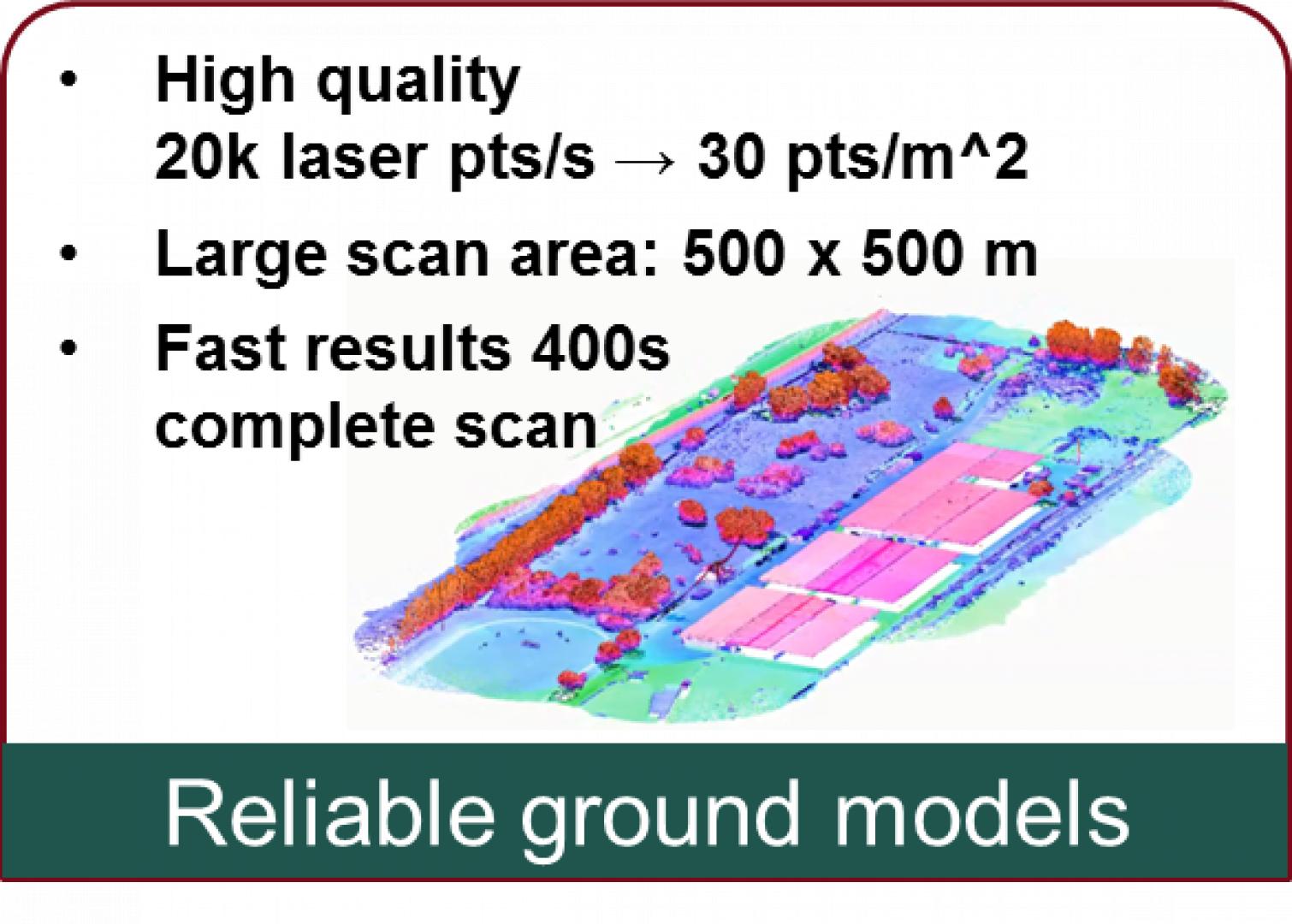
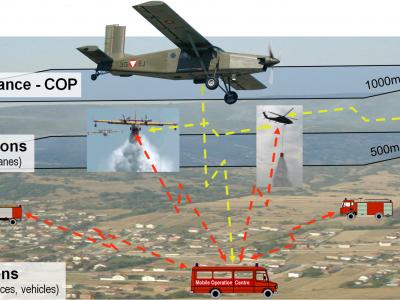
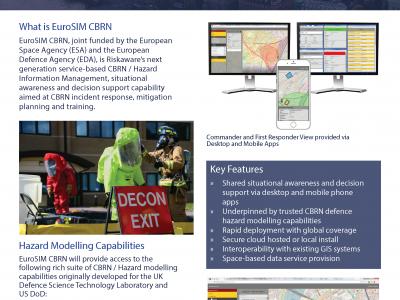
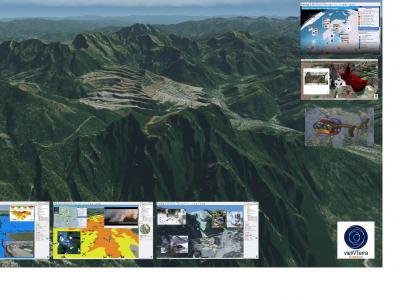
Il focus del progetto SECURESCUE è la mappatura 3D a 360° in tempo reale di un'area per consentire la alla catastrofe mediante robot esplorativi mobili. L'obiettivo consiste nell'ottenere una rapida consapevolezza della situazione e del per supportare in modo sicuro ed efficace l'intervento del personale di primo soccorso. Il nuovo scanner laser aereo è montato su un aeromobile a pilotaggio remoto (UAV) utilizzato per migliorare la consapevolezza della situazione per scenari di catastrofe.
I dati sono combinati con le informazioni disponibili rilevate dai sensori di bordo (ad es. rilevatori di gas e radiazioni) per l'esplorazione delle aree colpite dalla catastrofe e il rilevamento di possibili rischi (ad es. alti livelli di contaminazione, gas pericoloso), per garantire la sicurezza delle operazioni di ricerca e salvataggio. Il progetto ha sviluppato una rappresentazione in tempo reale delle informazioni 3D (ad es. visiva, radiazioni, chimica, posizione) e una visualizzazione continua in forma di mappa informativa 3D su terminali mobili (ad es. dispositivi portatili) per il personale di soccorso. L'intero sistema è stato valutato utilizzando scenari reali forniti dal Ministero della Difesa (BMLVS) dell'Austria Superiore.
Outdoor - Test nel mondo reale basato su UAV (aeromobile a pilotaggio remoto):
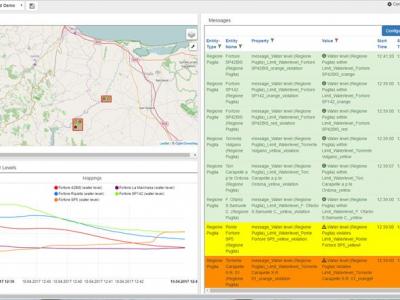
Generare una vista congrua dei sensori 3D LiDAR e CBRNE mediante
- fusione di tutte le misurazioni disponibili (LiDAR, radioattività) in un
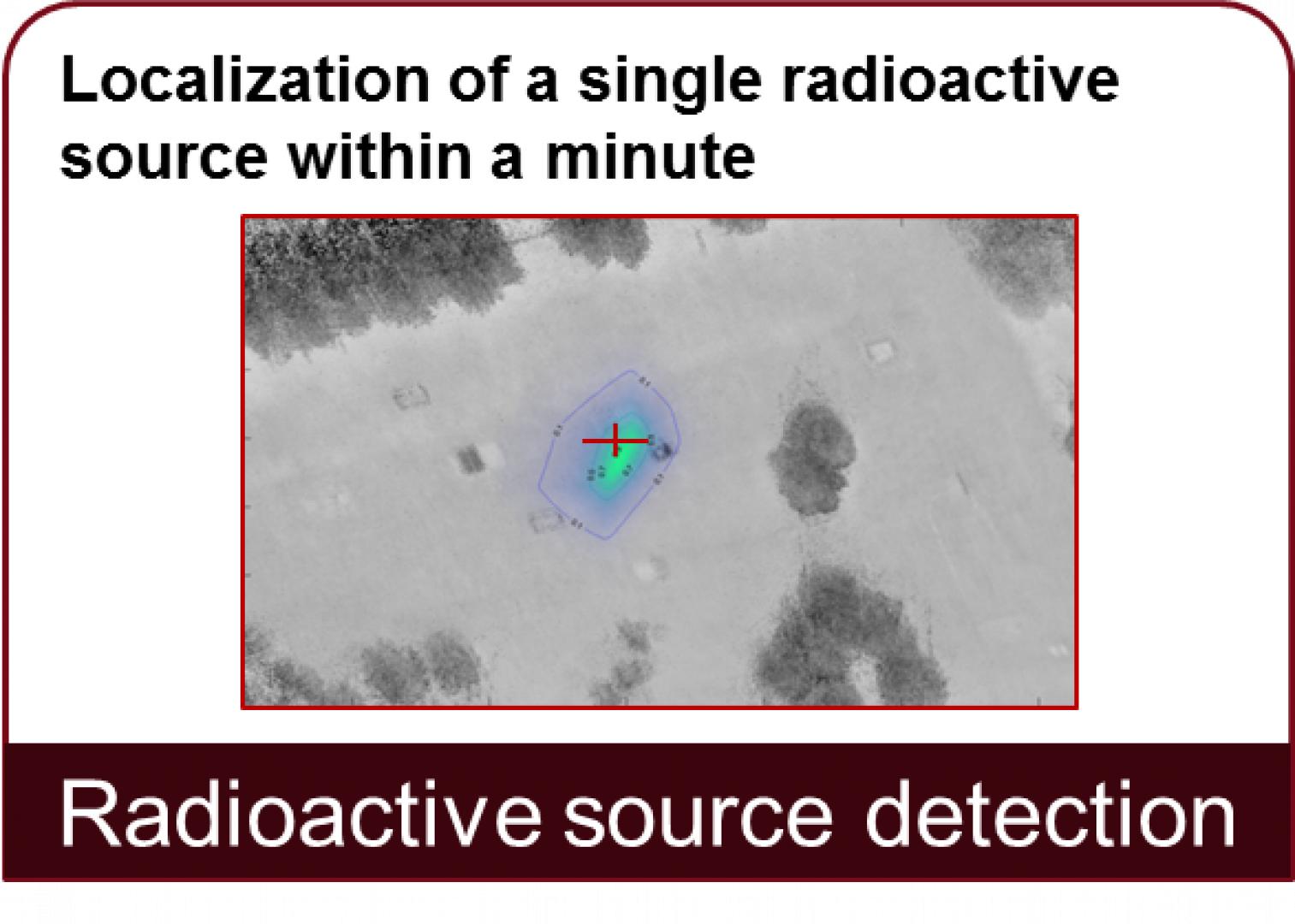
- insieme di informazioni globali per rivelare la posizione e i parametri delle sorgenti radioattive e
- la modellazione in tempo reale della contaminazione radioattiva
Supported Use Cases
SecuRescue: Indagine in tempo reale della situazione locale per le forze impegnate nella risposta all'emergenza con sostanze pericolose / sconosciute


Documentation
Similar Solutions

 |
Il sito web Portfolio of Solutions è stato inizialmente sviluppato nell'ambito del progetto DRIVER+. Oggi, il servizio è gestito da AIT Austrian Institute of Technology GmbH, a beneficio della gestione europea delle . PoS è approvato e supportato dal Disaster Competence Network Austria (DCNA) così come dai progetti STAMINA e TeamAware H2020. |