Contact
Provider(s):
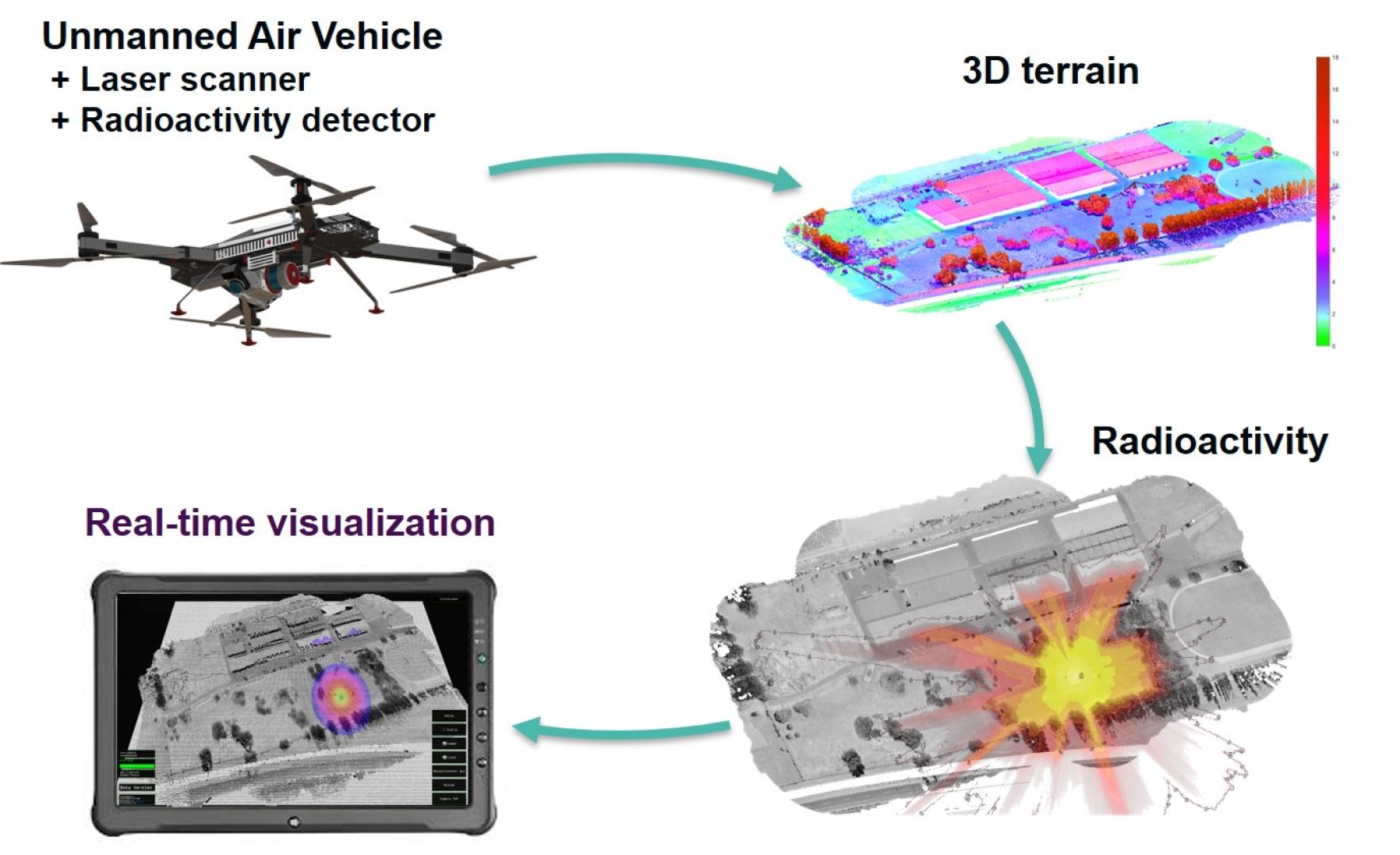
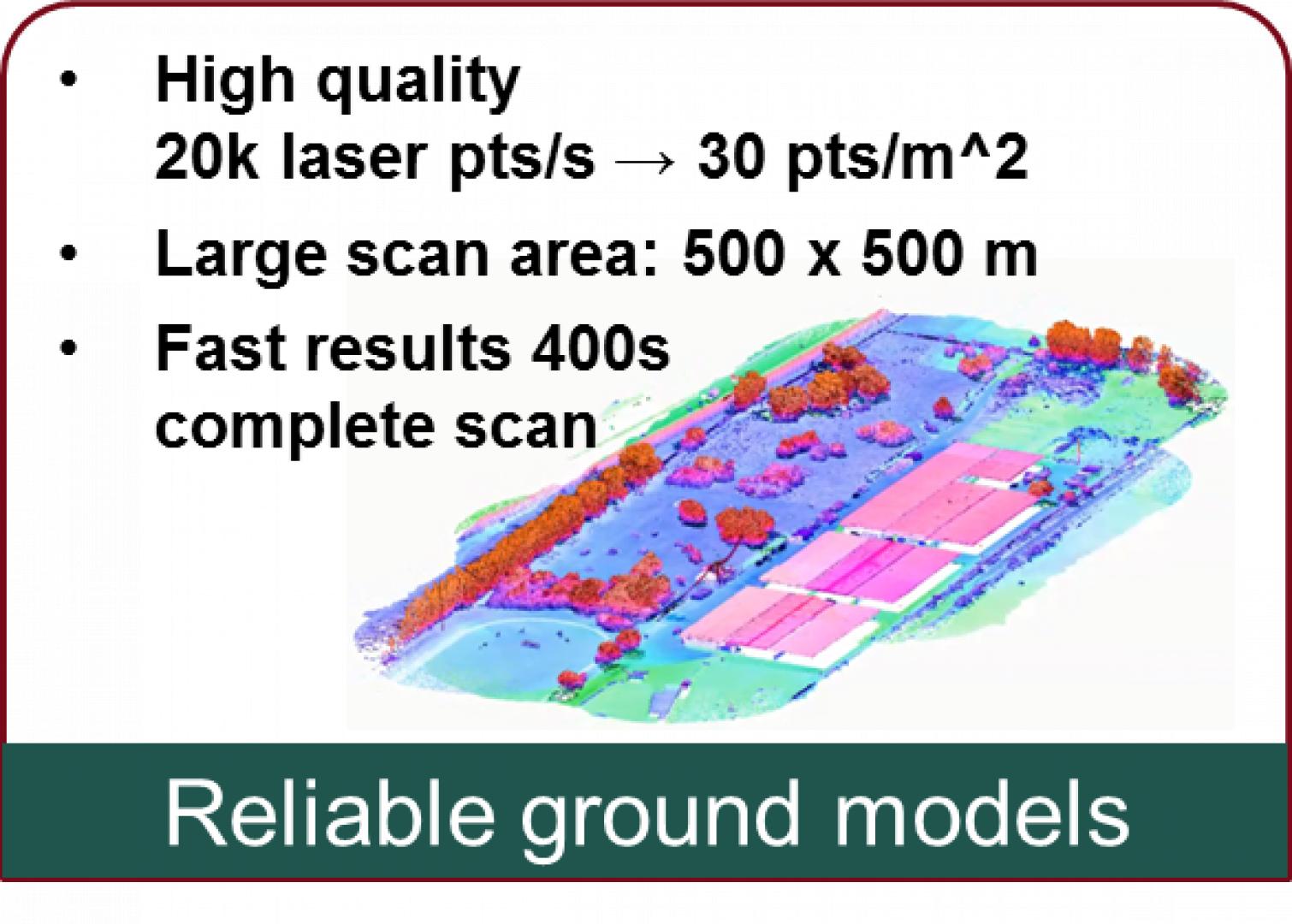
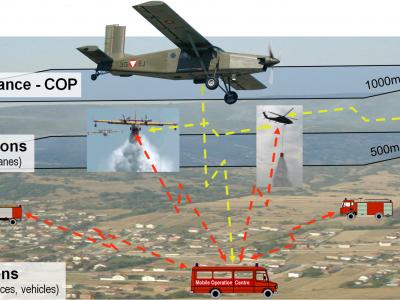
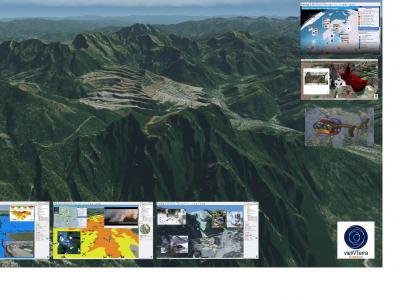
Fokus för SECURESCUE-projektet är 360 graders 3D-kartering i realtid av ett område för katastrofinsats med hjälp av mobila utforskningsrobotar. Målet är att snabbt uppnå situations- och riskmedvetenhet till stöd för en säker och effektiv utplacering av blåljusaktörer. Den nya luftburna laserskannern monteras på ett obemannat luftfartyg, och används för att förbättra lägesuppfattningen för katastrofscenarion.
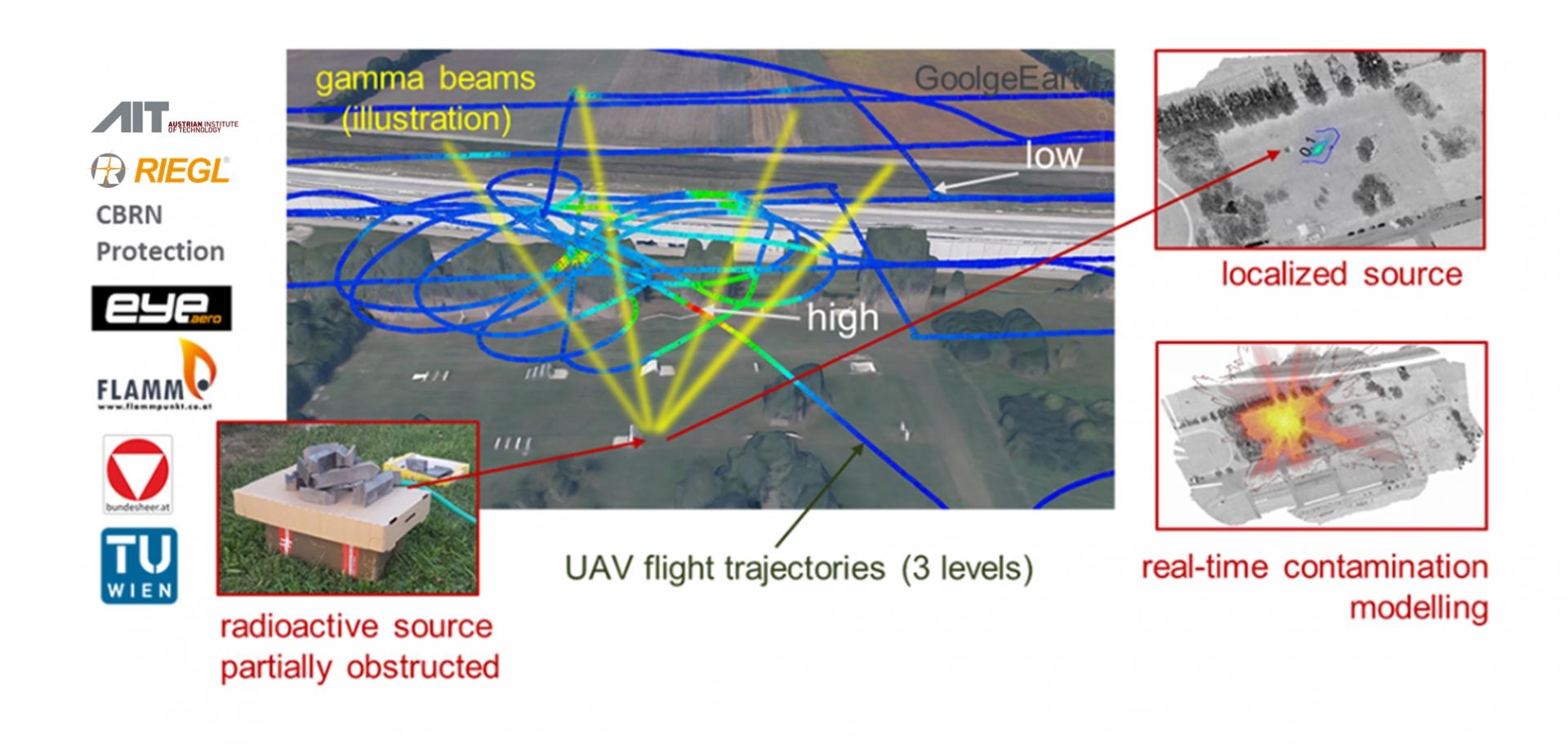
Datamängderna kombineras med befintlig information från ombordsensorer (t.ex. gas- och strålningsdetektorer) för att utforska katastrofområden och upptäcka möjliga risker (t.ex. höga föroreningsnivåer eller farlig gas) för säkra sök- och räddningsaktiviteter. Projektet utvecklade framställning av 3D-informationen (t.ex. visuell information, strålningsinformation, kemisk information eller positionsinformation) i realtid och kontinuerlig visualisering i form av en 3D-informationskarta på mobila terminaler (t.ex. handhållna enheter) för blåljusaktörer. Hela systemet har utvärderats med hjälp av verkliga scenarion från försvarsministeriet (BMLVS) i delstaten Oberösterreich i Österrike.
Utomhus – UAV-baserat (obemannad flygfarkost) realistiskt test:
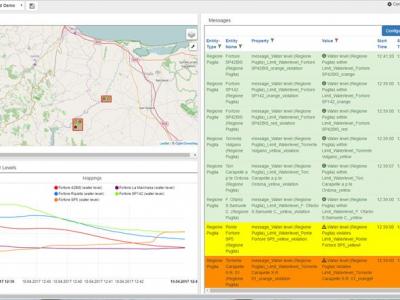
Generera en konsekvent vy över 3D-LiDAR-sensorer och CBRNE-sensorer genom att
- fusionera alla tillgängliga mätningar (LiDAR, radioaktivitet) till en
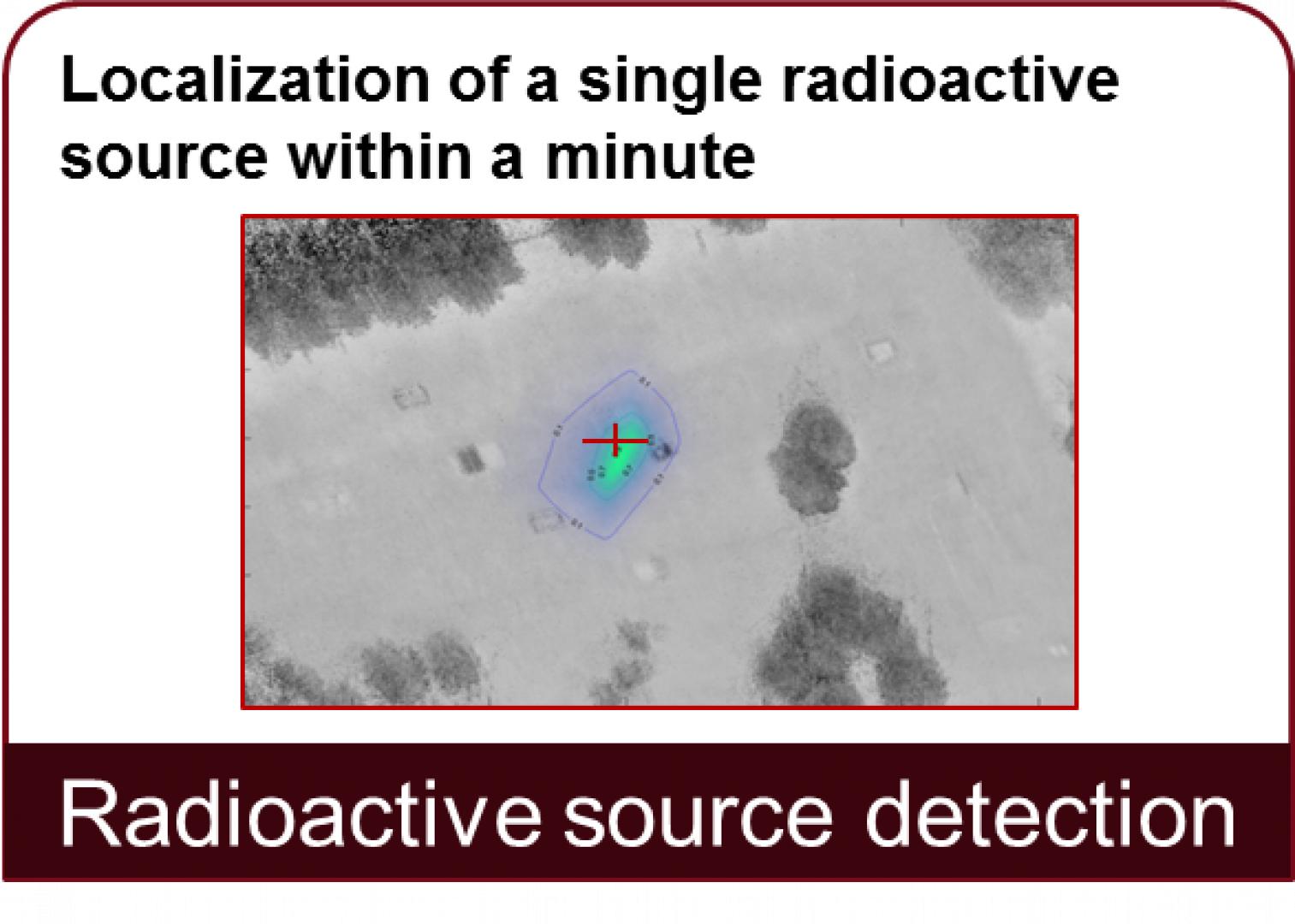
- omfattande informationsuppsättning för att uppdaga platsen och parametrarna för radioaktiva källor, och genom
- modellering i realtid av radioaktiv förorening
Supported Use Cases
SecuRescue: Situationsundersökning i realtid av den lokala situationen för nödstyrkor som utsätts för okända/farliga ämnen


Documentation
Similar Solutions

 |
Portfolio of Solutions web site has been initially developed in the scope of DRIVER+ project. Today, the service is managed by AIT Austrian Institute of Technology GmbH., for the benefit of the European Crisis Management. PoS is endorsed and supported by the Disaster Competence Network Austria (DCNA) as well as by the STAMINA and TeamAware H2020 projects. |