Contact
Provider(s):
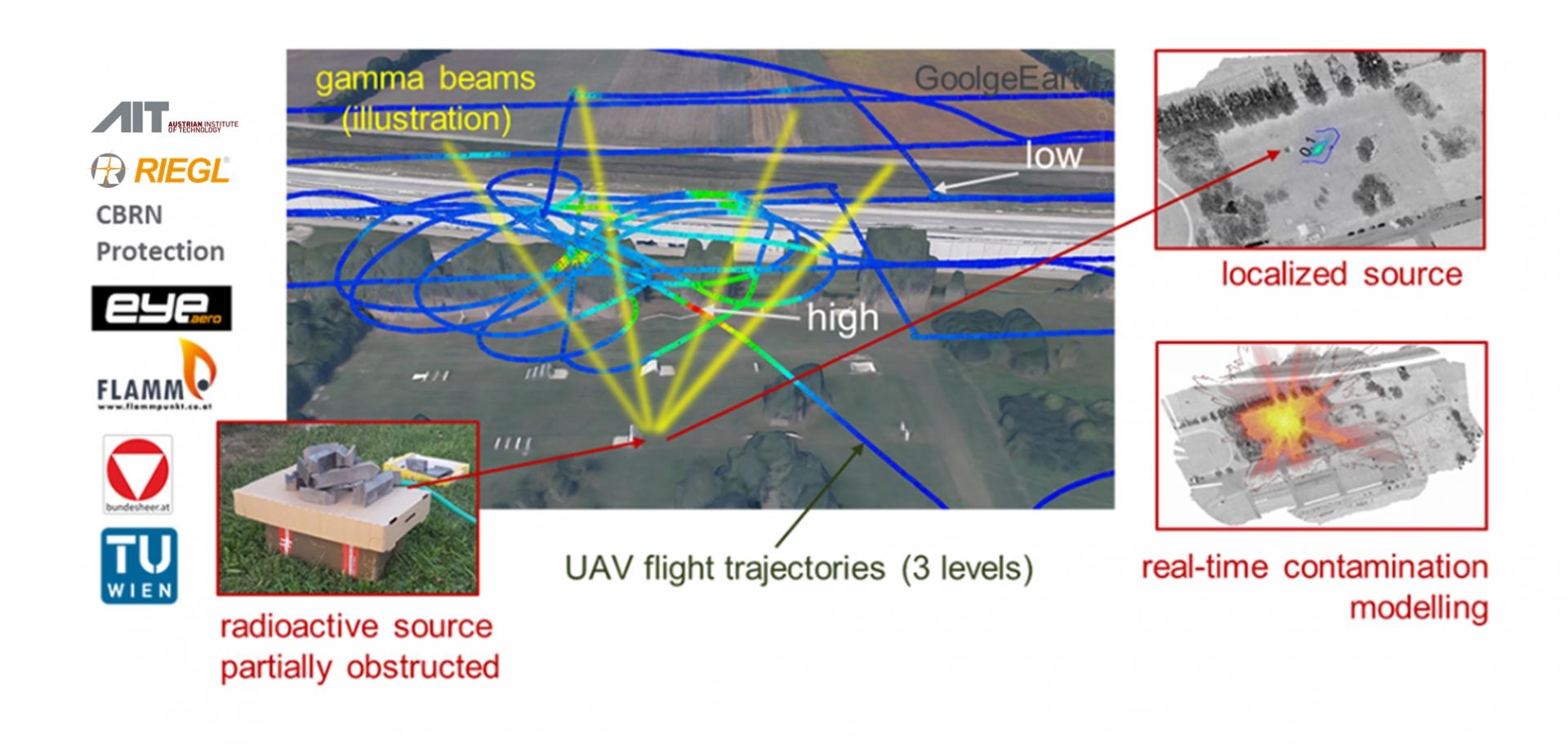
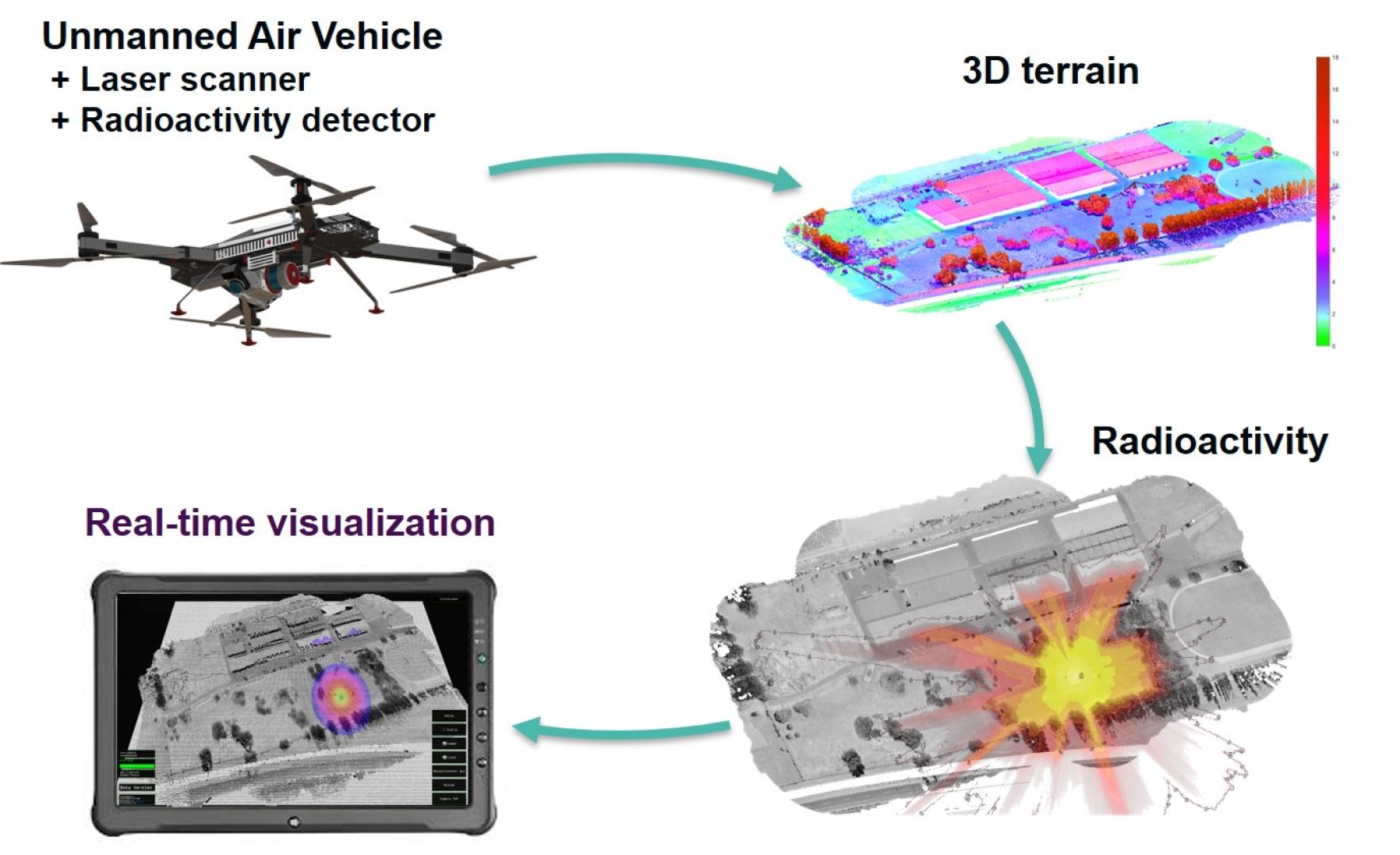
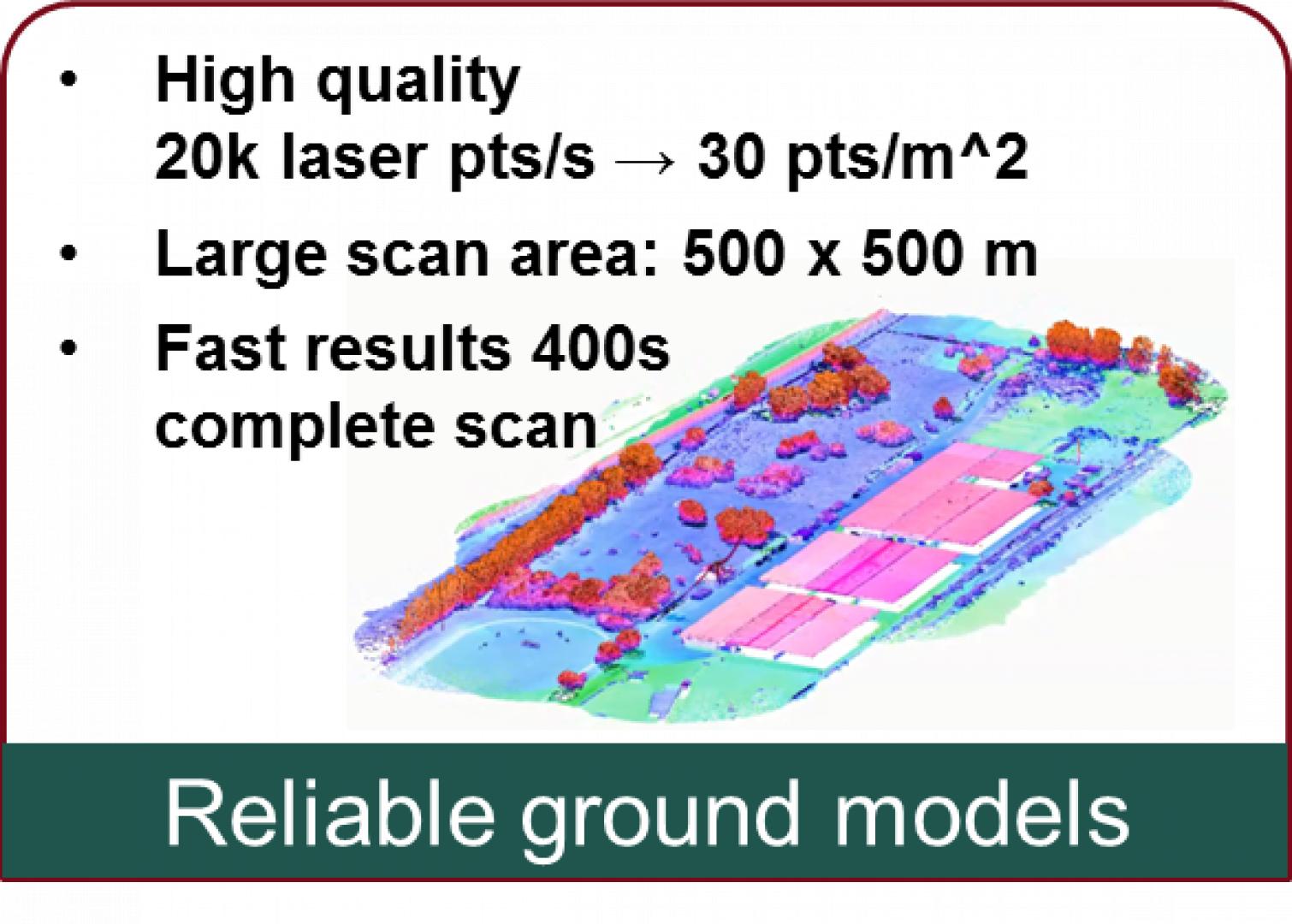
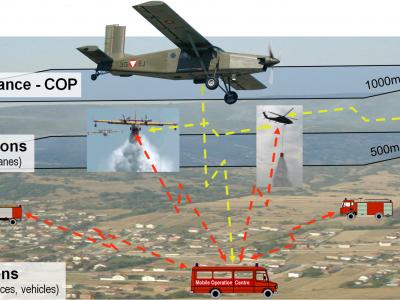
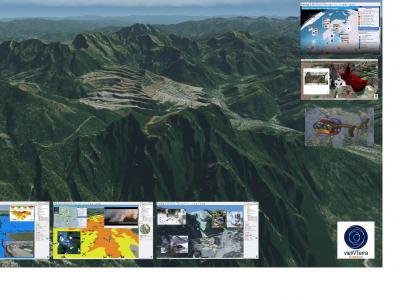
The focus of the SECURESCUE project is the real-time 3D 360° mapping of an area for using mobile exploration robots. The goal is to achieve fast situation and awareness to support the safe and efficient deployment of first responders. The novel airborne laser scanner is mounted on an unmanned aerial vehicle (UAV) is used to improve situation awareness for scenarios.
The data is combined with existing information from on-board sensors (e.g. gas and radiation detectors) for the exploration of disaster areas and detection of possible risks (e.g. high contamination levels, dangerous gas) for safe search and rescue activities. The project developed the real-time representation of the 3D information (e.g. visual, radiation, chemical, position) and continuous visualization in the form of a 3D information map on mobile terminals (e.g. handheld devices) for responders. The whole system has been evaluated using real scenarios from the Defence Ministry (BMLVS) in Upper Austria.
Outdoor – UAV-based (unmanned aerial vehicle) real-world test:
Generate a consistent view of 3D LiDAR and CBRNE sensors by
- fusing all available measurements (LiDAR, radioactivity) into a
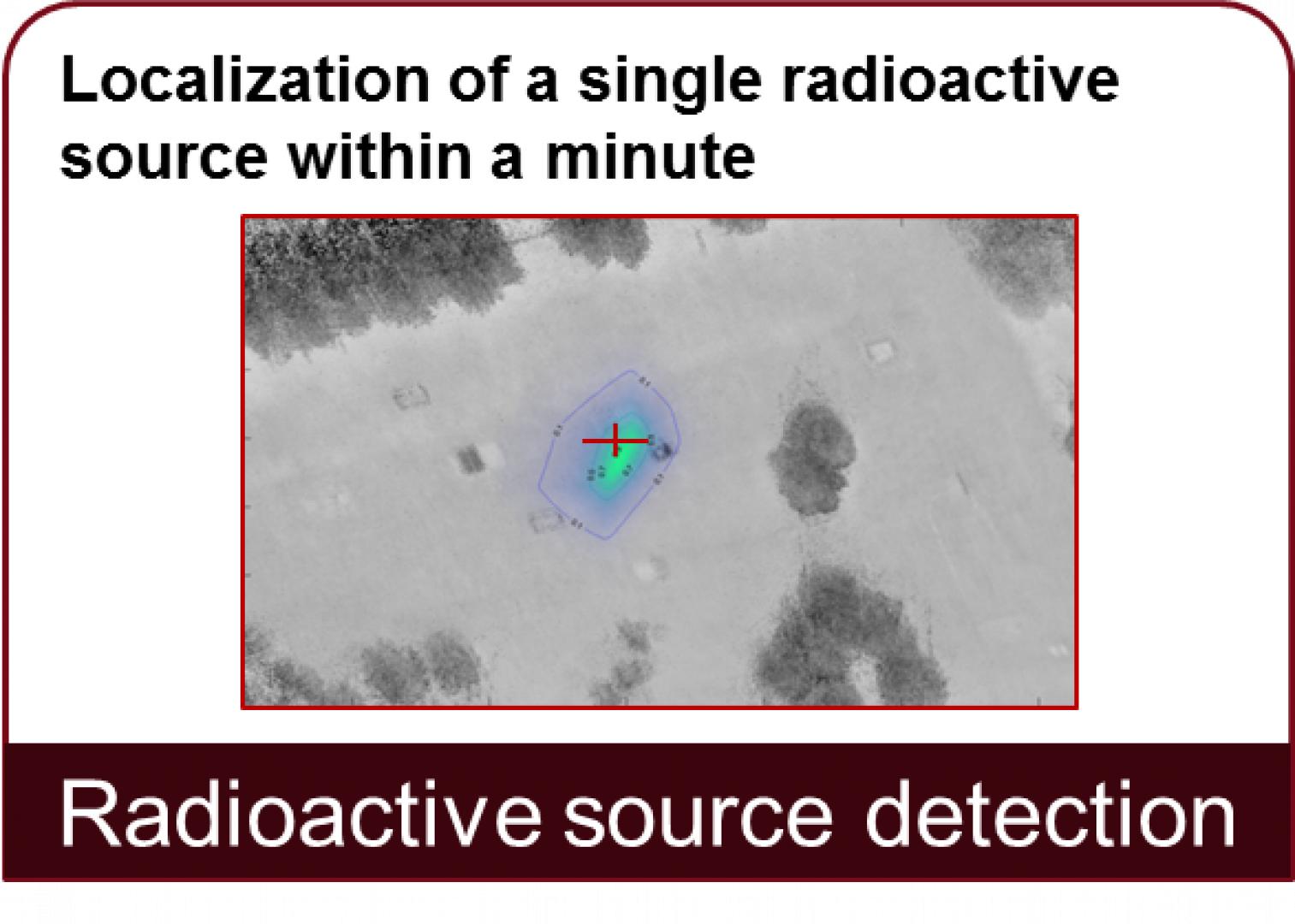
- comprehensive information set to reveal the location and parameters of radioactive sources, and
- real-time modelling of radioactive contamination
Supported Use Cases
SecuRescue: Real-time situation survey of the local situation for emergency response forces with unknown / dangerous hazardous substances


Documentation
Similar Solutions

 |
Portfolio of Solutions web site has been initially developed in the scope of DRIVER+ project. Today, the service is managed by AIT Austrian Institute of Technology GmbH., for the benefit of the European Management. PoS is endorsed and supported by the Disaster Competence Network Austria (DCNA) as well as by the STAMINA and TeamAware H2020 projects. |